Refine search
Actions for selected content:
212209 results in Engineering
Modified line-of-sight path following for a NASA generic transport model (GTM) with complete autopilot architecture
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1338 / August 2025
- Published online by Cambridge University Press:
- 13 June 2025, pp. 2149-2178
-
- Article
- Export citation
System’s resilience through a data-learning-guided maintenance planner
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1338 / August 2025
- Published online by Cambridge University Press:
- 13 June 2025, pp. 2216-2239
-
- Article
- Export citation

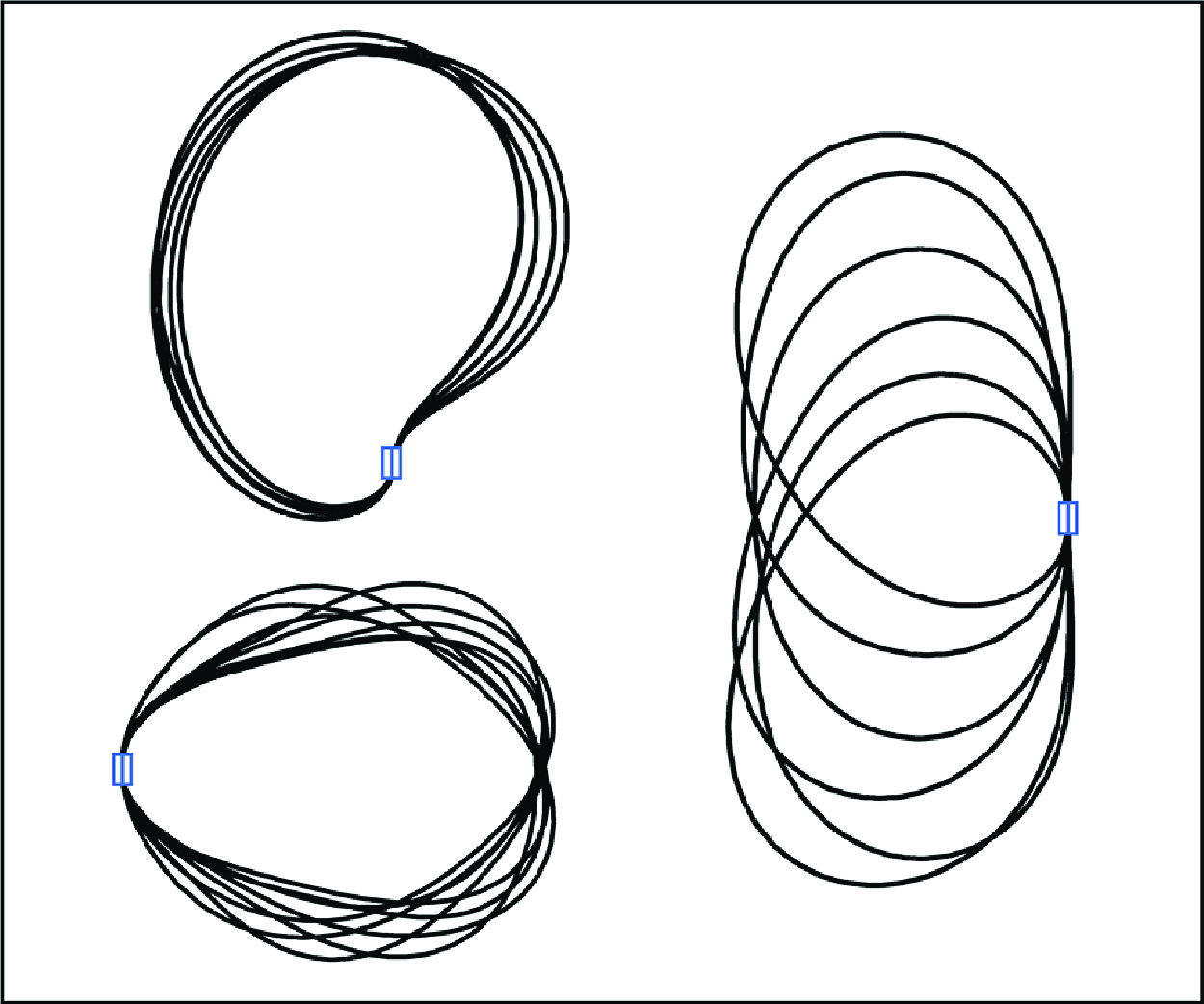
Dynamical modes of highly elastic loops settling under gravity in a viscous fluid
-
- Journal:
- Journal of Fluid Mechanics / Volume 1013 / 25 June 2025
- Published online by Cambridge University Press:
- 13 June 2025, A13
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
The settling of highly elastic non-Brownian closed fibres (called loops) under gravity in a viscous fluid is investigated numerically. The loops are represented using a bead–spring model with harmonic bending potential and finitely extensible nonlinear elastic stretching potential. Numerical solutions to the Stokes equations are obtained with the use of HYDROMULTIPOLE numerical codes, which are based on the multipole method corrected for lubrication to calculate hydrodynamic interactions between spherical particles with high precision. Depending on the elasto-gravitation number
 $B$, a ratio of gravitation to bending forces, the loop approaches different attracting dynamical modes, as described by Gruziel-Słomka et al. (2019 Soft Matt. 15, 7262–7274) with the use of the Rotne–Prager mobility of the elastic loop made of beads. Here, using a more precise method, we find and characterise a new mode, analyse typical time scales, velocities and orientations of all the modes, compare them and investigate their coexistence. We analyse numerically the transitions (bifurcations) to a different mode at certain critical values of the elasto-gravitation number.
$B$, a ratio of gravitation to bending forces, the loop approaches different attracting dynamical modes, as described by Gruziel-Słomka et al. (2019 Soft Matt. 15, 7262–7274) with the use of the Rotne–Prager mobility of the elastic loop made of beads. Here, using a more precise method, we find and characterise a new mode, analyse typical time scales, velocities and orientations of all the modes, compare them and investigate their coexistence. We analyse numerically the transitions (bifurcations) to a different mode at certain critical values of the elasto-gravitation number.

Apollon Real-Time Adaptive Optics: astronomy-inspired wavefront stabilization in ultraintense lasers - ERRATUM
-
- Journal:
- High Power Laser Science and Engineering / Volume 13 / 2025
- Published online by Cambridge University Press:
- 13 June 2025, e36
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Multiscale settling dynamics of Kolmogorov-scale sediment-like particles in turbulence
-
- Journal:
- Journal of Fluid Mechanics / Volume 1013 / 25 June 2025
- Published online by Cambridge University Press:
- 13 June 2025, A5
-
- Article
- Export citation
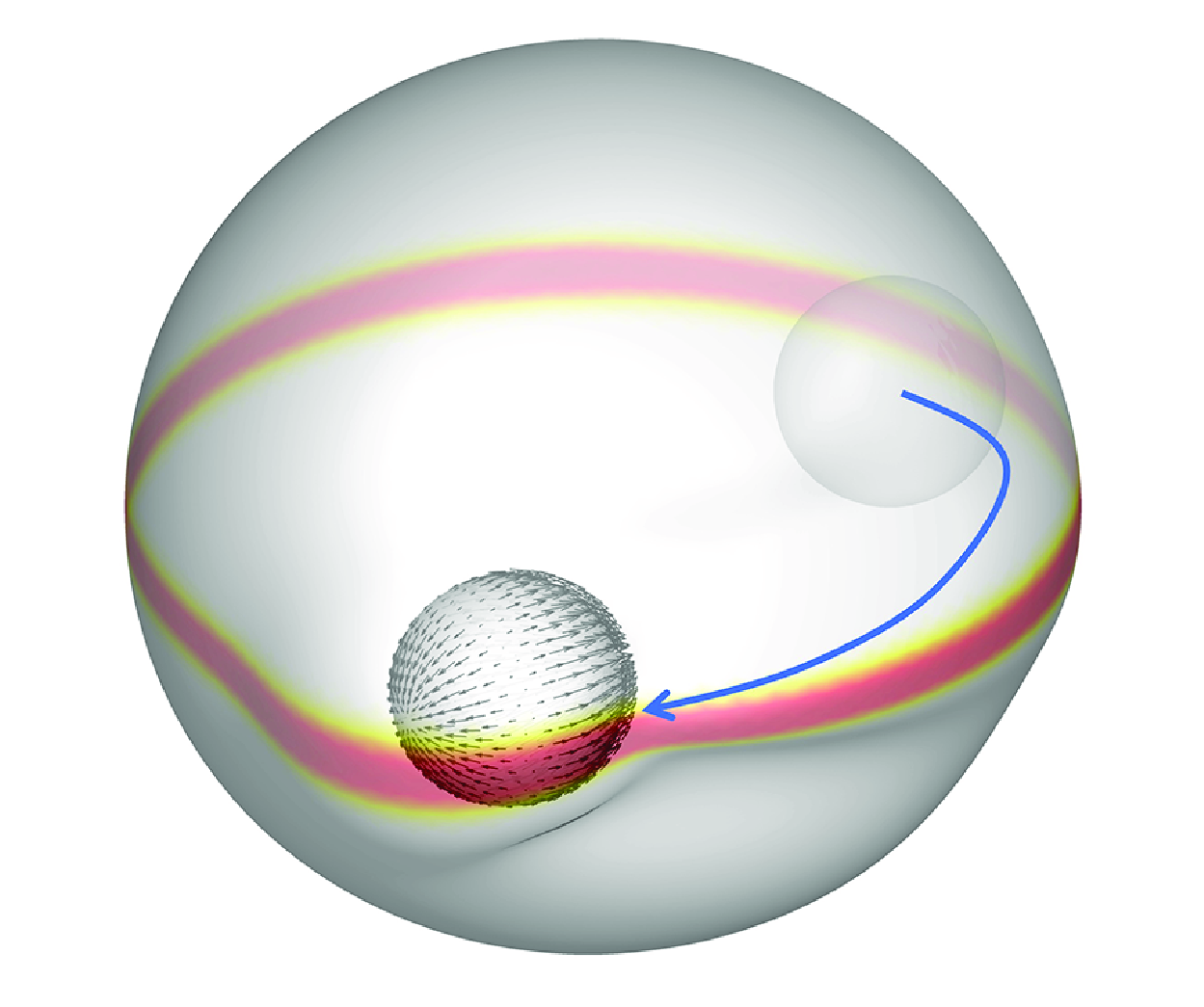
Capsule damage by an enclosed microswimmer
-
- Journal:
- Journal of Fluid Mechanics / Volume 1013 / 25 June 2025
- Published online by Cambridge University Press:
- 13 June 2025, A12
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Comparative analysis of spatiotemporal gait parameters in patients with distal femoral megaprosthesis and healthy subjects using an inertial measurement unit (IMU)
-
- Journal:
- Wearable Technologies / Volume 6 / 2025
- Published online by Cambridge University Press:
- 13 June 2025, e25
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Flow-induced oscillations of a clamped flexible ring
-
- Journal:
- Journal of Fluid Mechanics / Volume 1013 / 25 June 2025
- Published online by Cambridge University Press:
- 13 June 2025, A6
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

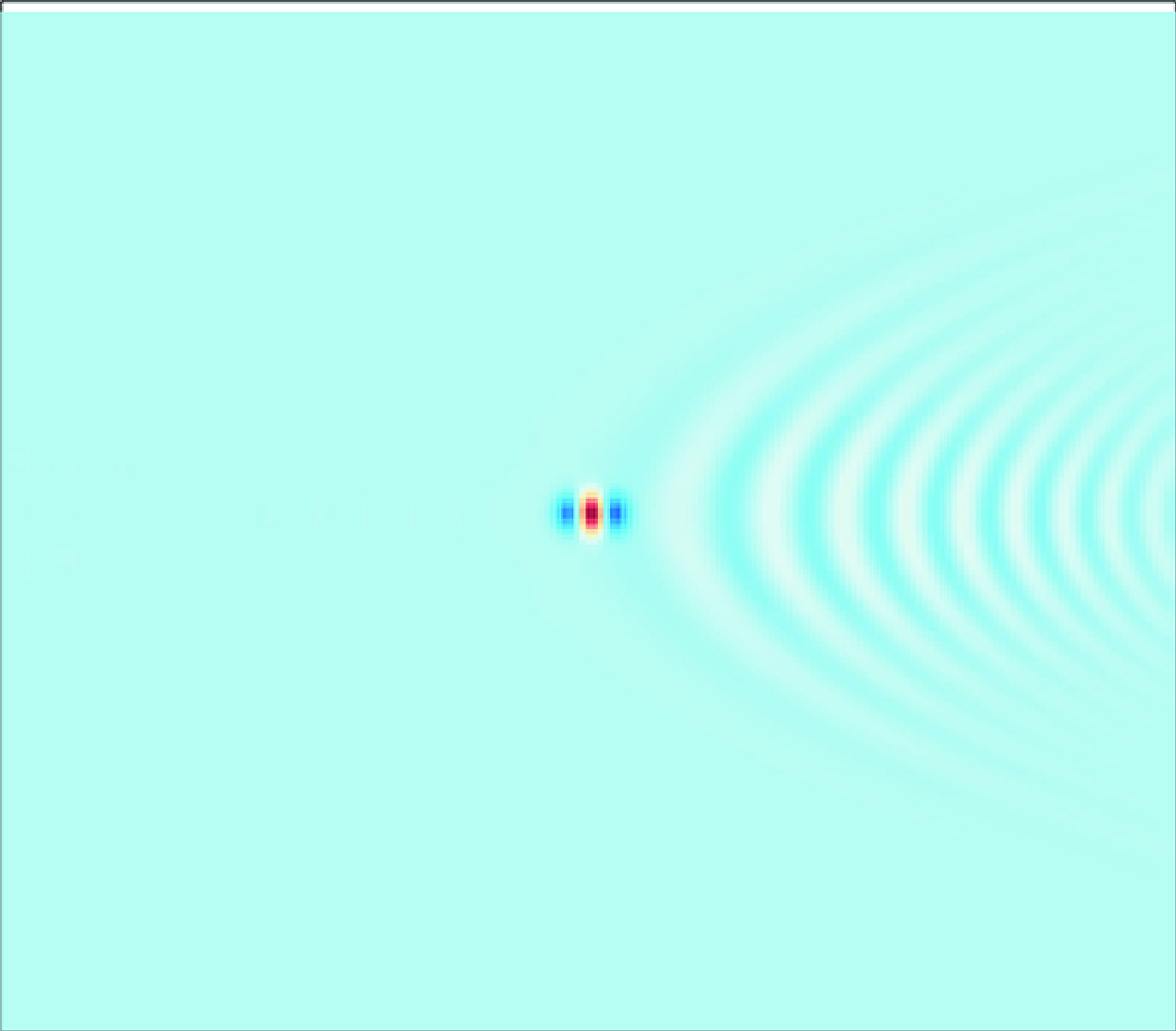
Response of non-premixed jet flames to blast waves
-
- Journal:
- Journal of Fluid Mechanics / Volume 1013 / 25 June 2025
- Published online by Cambridge University Press:
- 13 June 2025, A3
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
The work investigates the response dynamics of non-premixed jet flames to blast waves that are incident along the jet axis. In the present study, blast waves, generated using the wire-explosion technique, are forced to sweep across a non-premixed jet flame that is stabilised over a nozzle rim positioned at a distance of 264 mm from the source of the blast waves. The work spans a wide range of fuel-jet Reynolds numbers (
 $Re$; ranging from 267 to 800) and incident blast-wave Mach numbers (
$Re$; ranging from 267 to 800) and incident blast-wave Mach numbers ( $M_{s,r}$; ranging from 1.025 to 1.075). The interaction imposes a characteristic flow field over the jet flame marked by a sharp discontinuity followed by a decaying profile and a delayed second spike. The second spike in the flow field profile corresponds to the induced flow that follows the blast front. While the response of the flame to the blast front was minimal, it was found to detach from the nozzle rim and lift off following the interaction with the induced flow. Subsequently, the lifted flame was found to reattach back at the nozzle or extinguish, contingent on the operating
$M_{s,r}$; ranging from 1.025 to 1.075). The interaction imposes a characteristic flow field over the jet flame marked by a sharp discontinuity followed by a decaying profile and a delayed second spike. The second spike in the flow field profile corresponds to the induced flow that follows the blast front. While the response of the flame to the blast front was minimal, it was found to detach from the nozzle rim and lift off following the interaction with the induced flow. Subsequently, the lifted flame was found to reattach back at the nozzle or extinguish, contingent on the operating  $Re$ and
$Re$ and  $M_{s,r}$. Alongside flame lift-off, flame-tip flickering was aggravated under the influence of the induced flow. A simplified theoretical model extending the vorticity transport equation was developed to estimate the change in flickering time scales and length scales owing to the interaction with the induced flow. The observed experimental trends were further compared against theoretical predictions from the model.
$M_{s,r}$. Alongside flame lift-off, flame-tip flickering was aggravated under the influence of the induced flow. A simplified theoretical model extending the vorticity transport equation was developed to estimate the change in flickering time scales and length scales owing to the interaction with the induced flow. The observed experimental trends were further compared against theoretical predictions from the model.




A B-integral management strategy in discrete single-crystal fibers: towards direct power scaling of femtosecond sources near 2 μm
-
- Journal:
- High Power Laser Science and Engineering / Volume 13 / 2025
- Published online by Cambridge University Press:
- 13 June 2025, e53
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Towards eliminating the nonlinear Kelvin wake
-
- Journal:
- Journal of Fluid Mechanics / Volume 1013 / 25 June 2025
- Published online by Cambridge University Press:
- 13 June 2025, A10
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Rebounding hydrogel sphere water entry
-
- Journal:
- Journal of Fluid Mechanics / Volume 1013 / 25 June 2025
- Published online by Cambridge University Press:
- 13 June 2025, A2
-
- Article
- Export citation

Dynamics of rotating helices in a viscous fluid
-
- Journal:
- Journal of Fluid Mechanics / Volume 1013 / 25 June 2025
- Published online by Cambridge University Press:
- 13 June 2025, R1
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Classification of carrier-based aircraft pilot mental workloads based on feature-level fusion and decision-level fusion of PPG and EEG signals
-
- Journal:
- The Aeronautical Journal / Volume 129 / Issue 1340 / October 2025
- Published online by Cambridge University Press:
- 13 June 2025, pp. 2757-2776
-
- Article
- Export citation

Aerodynamics for Engineers
-
- Published online:
- 12 June 2025
- Print publication:
- 12 June 2025
-
- Textbook
- Export citation
Appendix B - A Collection of Often Used Tables
-
- Book:
- Aerodynamics for Engineers
- Published online:
- 12 June 2025
- Print publication:
- 12 June 2025, pp 909-916
-
- Chapter
- Export citation
Index
-
- Book:
- Aerodynamics for Engineers
- Published online:
- 12 June 2025
- Print publication:
- 12 June 2025, pp 932-939
-
- Chapter
- Export citation
5 - Characteristic Parameters for Airfoil and Wing Aerodynamics
-
- Book:
- Aerodynamics for Engineers
- Published online:
- 12 June 2025
- Print publication:
- 12 June 2025, pp 254-330
-
- Chapter
- Export citation
9 - Compressible, Subsonic Flows and Transonic Flows
-
- Book:
- Aerodynamics for Engineers
- Published online:
- 12 June 2025
- Print publication:
- 12 June 2025, pp 579-629
-
- Chapter
- Export citation
11 - Supersonic Flows Over Wings and Airplane Configurations
-
- Book:
- Aerodynamics for Engineers
- Published online:
- 12 June 2025
- Print publication:
- 12 June 2025, pp 659-735
-
- Chapter
- Export citation
