Refine search
Actions for selected content:
212201 results in Engineering
20 - ★ Cone-Convex Functions: Elementary Calculus and Examples
- from Part IV - Convex Programming, Lagrange Duality, Saddle Points
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 277-283
-
- Chapter
- Export citation
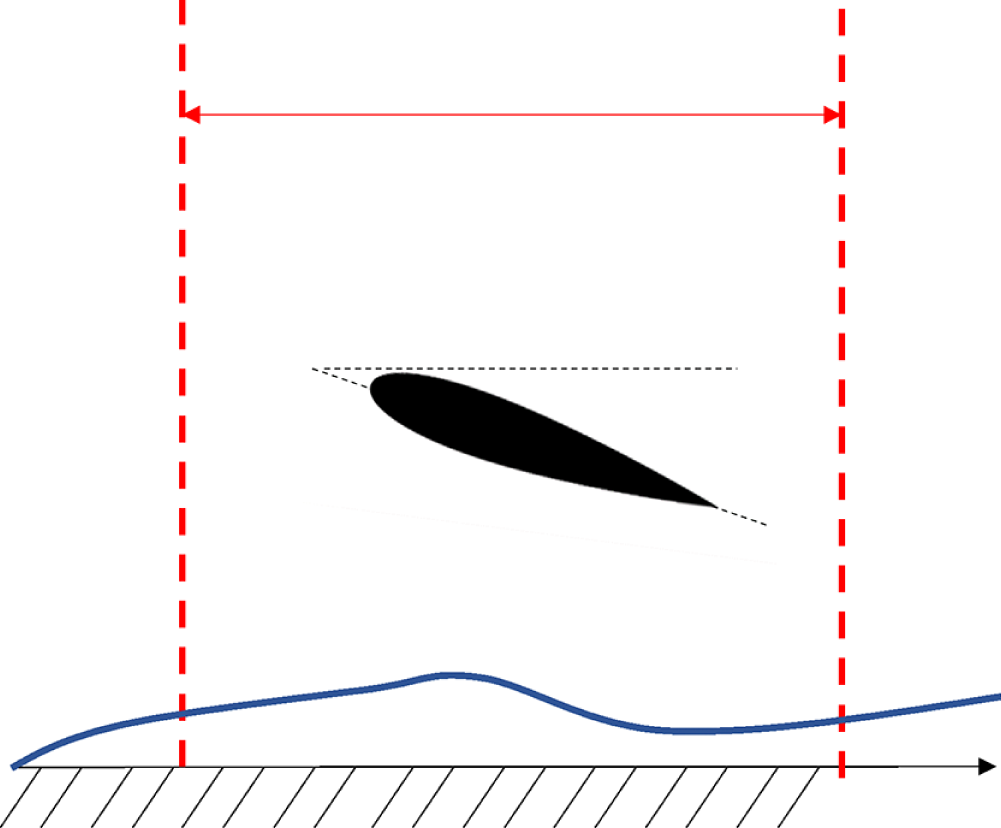
Pressure gradient history effects on integral quantities of turbulent boundary layers: experiments and data-driven models
-
- Journal:
- Journal of Fluid Mechanics / Volume 1014 / 10 July 2025
- Published online by Cambridge University Press:
- 26 June 2025, A2
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
Experiments are carried out in a smooth-wall turbulent boundary layer (TBL) (
 $\textit{Re}_\tau \geq 3500$) subjected to different pressure gradient (PG) histories. Oil-film interferometry is used to measure the skin friction evolution over the entire history while wide-field particle image velocimetry captures the mean flow field. This data are used to demonstrate the influence of PG history on skin friction as well as other integral quantities such as displacement (
$\textit{Re}_\tau \geq 3500$) subjected to different pressure gradient (PG) histories. Oil-film interferometry is used to measure the skin friction evolution over the entire history while wide-field particle image velocimetry captures the mean flow field. This data are used to demonstrate the influence of PG history on skin friction as well as other integral quantities such as displacement ( $\delta ^*$) and momentum thickness (
$\delta ^*$) and momentum thickness ( $\theta$). Based on observations from the data, a new set of ordinary differential equations are proposed to model the streamwise evolution of a TBL subjected to different PG histories. The model is calibrated using a limited number of experimental cases and its utility is demonstrated on other cases. Moreover, the model is applied to data from large-eddy simulations of flows in adverse PG conditions (Bobke et al. 2017, J. Fluid Mech. 820, 667–692). The model is subsequently used to identify the impact of PG history length on the boundary layer. This can also be interpreted as determining the spatial frequency response of the boundary layer to PG disturbances. Results suggest that short spatial variations in PGs primarily affect a small portion of the TBL evolution, whereas longer-lasting ones have a more extensive impact.
$\theta$). Based on observations from the data, a new set of ordinary differential equations are proposed to model the streamwise evolution of a TBL subjected to different PG histories. The model is calibrated using a limited number of experimental cases and its utility is demonstrated on other cases. Moreover, the model is applied to data from large-eddy simulations of flows in adverse PG conditions (Bobke et al. 2017, J. Fluid Mech. 820, 667–692). The model is subsequently used to identify the impact of PG history length on the boundary layer. This can also be interpreted as determining the spatial frequency response of the boundary layer to PG disturbances. Results suggest that short spatial variations in PGs primarily affect a small portion of the TBL evolution, whereas longer-lasting ones have a more extensive impact.



Part IV - Convex Programming, Lagrange Duality, Saddle Points
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 233-341
-
- Chapter
- Export citation
7 - Geometry of Polyhedral Sets
- from Part II - Separation Theorem, Extreme Points, Recessive Directions, and Geometry of Polyhedral Sets
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 118-134
-
- Chapter
- Export citation
9 - First Acquaintance with Convex Functions
- from Part III - Convex Functions
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 153-157
-
- Chapter
- Export citation
2 - Theorems of Carathéodory, Radon, and Helly
- from Part I - Convex sets in Rn: From First Acquaintance to Linear Programming Duality
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 28-37
-
- Chapter
- Export citation
22 - Saddle Points
- from Part IV - Convex Programming, Lagrange Duality, Saddle Points
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 297-306
-
- Chapter
- Export citation
Index
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 426-430
-
- Chapter
- Export citation
11 - Minima and Maxima of Convex Functions
- from Part III - Convex Functions
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 175-183
-
- Chapter
- Export citation
15 - Exercises for Part III
- from Part III - Convex Functions
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 218-232
-
- Chapter
- Export citation
1 - First Acquaintance with Convex Sets
- from Part I - Convex sets in Rn: From First Acquaintance to Linear Programming Duality
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 3-27
-
- Chapter
- Export citation
17 - Lagrange Function and Lagrange Duality
- from Part IV - Convex Programming, Lagrange Duality, Saddle Points
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 249-251
-
- Chapter
- Export citation
6 - Separation Theorem and Geometry of Convex Sets
- from Part II - Separation Theorem, Extreme Points, Recessive Directions, and Geometry of Polyhedral Sets
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 83-117
-
- Chapter
- Export citation
Reviews
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp ii-ii
-
- Chapter
- Export citation

A geometrical Green–Naghdi-type system for dispersive-like waves in prismatic channels
-
- Journal:
- Journal of Fluid Mechanics / Volume 1014 / 10 July 2025
- Published online by Cambridge University Press:
- 26 June 2025, A5
-
- Article
- Export citation
5 - Exercises for Part I
- from Part I - Convex sets in Rn: From First Acquaintance to Linear Programming Duality
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 60-80
-
- Chapter
- Export citation
8 - Exercises for Part II
- from Part II - Separation Theorem, Extreme Points, Recessive Directions, and Geometry of Polyhedral Sets
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 135-150
-
- Chapter
- Export citation
14 - ★ Functions of Eigenvalues of Symmetric Matrices
- from Part III - Convex Functions
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 212-217
-
- Chapter
- Export citation
16 - Convex Programming Problems and Convex Theorem of the Alternative
- from Part IV - Convex Programming, Lagrange Duality, Saddle Points
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 235-248
-
- Chapter
- Export citation
21 - ★ Mathematical Programming Optimality Conditions
- from Part IV - Convex Programming, Lagrange Duality, Saddle Points
-
- Book:
- Essential Mathematics for Convex Optimization
- Published online:
- 22 October 2025
- Print publication:
- 26 June 2025, pp 284-296
-
- Chapter
- Export citation
