Refine search
Actions for selected content:
212269 results in Engineering
About the Authors
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp xii-xii
-
- Chapter
- Export citation
1 - Introduction
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp 1-10
-
- Chapter
-
- You have access
- Export citation
Appendix A - Short Primer on Stochastic Simulation
-
- Book:
- Partially Observed Markov Decision Processes
- Published online:
- 16 May 2025
- Print publication:
- 05 June 2025, pp 570-584
-
- Chapter
- Export citation
12 - Planning with Nondeterministic Models
- from Part IV - Nondeterministic Models
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp 309-341
-
- Chapter
- Export citation
15 - Hierarchical Refinement Planning
- from Part V - Hierarchical Refinement Models
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp 368-379
-
- Chapter
- Export citation
Bibliographic Abbreviations
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp 573-574
-
- Chapter
- Export citation
2 - Deterministic Representation and Acting
- from Part I - Deterministic State-Transition Systems
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp 13-33
-
- Chapter
- Export citation
Appendix B - Continuous-Time HMM Filters
-
- Book:
- Partially Observed Markov Decision Processes
- Published online:
- 16 May 2025
- Print publication:
- 05 June 2025, pp 585-592
-
- Chapter
- Export citation
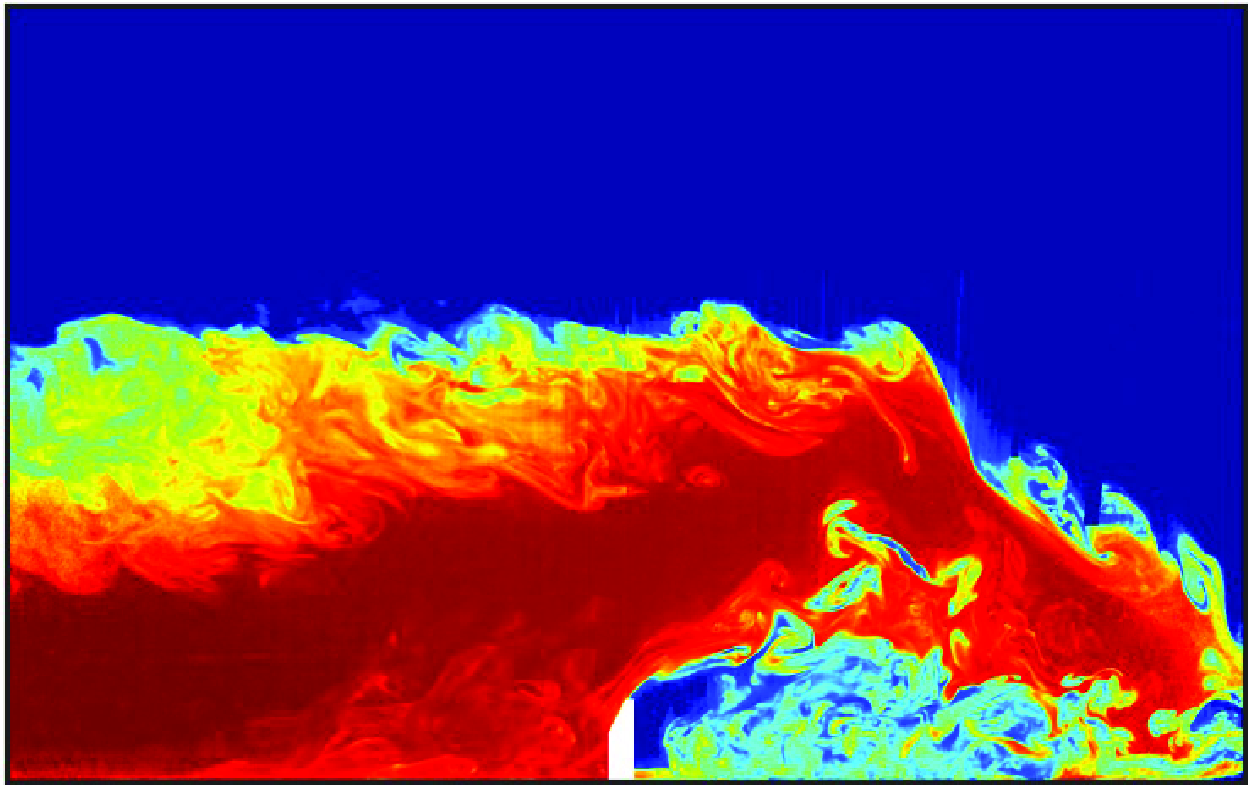
Gravity currents past thin two-dimensional obstacles
-
- Journal:
- Journal of Fluid Mechanics / Volume 1012 / 10 June 2025
- Published online by Cambridge University Press:
- 05 June 2025, A15
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
19 - Discrete Stochastic Optimization
- from Part IV - Stochastic Gradient Algorithms and Reinforcement Learning
-
- Book:
- Partially Observed Markov Decision Processes
- Published online:
- 16 May 2025
- Print publication:
- 05 June 2025, pp 509-522
-
- Chapter
- Export citation
3 - Optimal Filtering
- from Part I - Stochastic Models and Bayesian Inference
-
- Book:
- Partially Observed Markov Decision Processes
- Published online:
- 16 May 2025
- Print publication:
- 05 June 2025, pp 34-70
-
- Chapter
- Export citation
References
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp 576-609
-
- Chapter
- Export citation
18 - Stochastic Gradient Algorithms. Convergence Analysis
- from Part IV - Stochastic Gradient Algorithms and Reinforcement Learning
-
- Book:
- Partially Observed Markov Decision Processes
- Published online:
- 16 May 2025
- Print publication:
- 05 June 2025, pp 466-508
-
- Chapter
- Export citation
Part I - Deterministic State-Transition Systems
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp 11-12
-
- Chapter
- Export citation
13 - Structural Results for Stopping-Time POMDPs
- from Part III - POMDP Structural Results
-
- Book:
- Partially Observed Markov Decision Processes
- Published online:
- 16 May 2025
- Print publication:
- 05 June 2025, pp 327-375
-
- Chapter
- Export citation
Part VI - Temporal Models
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp 389-390
-
- Chapter
- Export citation
Part IV - Nondeterministic Models
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp 271-274
-
- Chapter
- Export citation
Dedication
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp v-vi
-
- Chapter
- Export citation
7 - Learning HTN Methods
- from Part II - Hierarchical Task Networks
-
- Book:
- Acting, Planning, and Learning
- Published online:
- 19 May 2025
- Print publication:
- 05 June 2025, pp 132-146
-
- Chapter
- Export citation
Part III - POMDP Structural Results
-
- Book:
- Partially Observed Markov Decision Processes
- Published online:
- 16 May 2025
- Print publication:
- 05 June 2025, pp 255-256
-
- Chapter
- Export citation
